2023年12月28日
A34:当社技術資料のClosed-Loop制御(変位フィードバック)の項目から一部を抜粋し、ご紹介させていただきます。
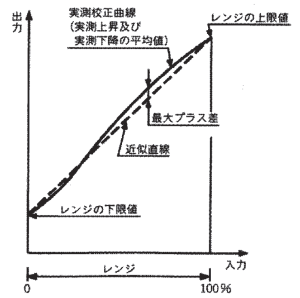
【非直線性】
始点から終点(フルストローク)までの一定方向に順次位置決めを行い(往路)、
更に終点から始点まで同じように位置決めを行います(復路)。
それぞれの基準位置と実測変位量の差を測定。
始点と終点の偏差を0に補正後、その最大値と最小値の差に1/2乗じ、±をつけて表します。
【 Q34:Closed-Loop制御(変位フィードバック)_その4】に関連があるQ&A
Q2:オープンループ制御・クローズドループ制御とは?◆
Q12:ピエゾアクチュエータを選ぶのに必要な仕様条件◆
Q15:ピエゾアクチュエータ、ピエゾステージの位置決めの精度とは?◆
Q31:Closed-Loop制御(変位フィードバック)_その1◆
Q32:Closed-Loop制御(変位フィードバック)_その2◆
Q33:Closed-Loop制御(変位フィードバック)_その3◆
技術資料
トータル技術資料◆
ご使用方法についてご検討されていましたら、お気軽にご相談ください。
ご質問をお待ちしております。